The competition is supported by:

| Most Elegant Solution |
| XL Team, Tsinghua University: Xiang Li, Yongpeng Jiang, Mingrui Yu, Yongyi Jia, and Chen Chen |
| Manufacturing Track |
| Tsinghua 3C united: Fuchun Sun, Huaidong Zhou, Wentao Liu, Jiahui Guo, and Jiaxing Hou |
| Cloth Manipulation Sub-Track |
| AIR-JNU: Giwan Lee, Jiyoung Choi, Jeongil Choi, Geon Kim, and Phayuth Yonrit |
| In-Hand Manipulation |
| XL Team, Tsinghua University: Xiang Li, Yongpeng Jiang, Mingrui Yu, Yongyi Jia, and Chen Chen |
| Picking in Clutter Sub-Track |
| THU-bot: Xueqian Wang, Shoujie Li, Xiankun Zhu, Yucheng Xin, and Xianru Tian |
| Human-to-Robot Handovers |
| SirsIIT: Enrico Turco, Valerio Bo, Chiara Castellani, Maria Pozzi and Gionata Salvietti |
|
|
 |
|
|
|
| |
|
|
| |
|
|

|
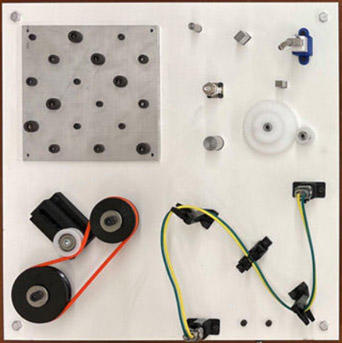
There will be two manufacturing sub-tasks in the competition, disassembly and assembly using a NIST Task Board (NTB). Due to the competition format, up to ten teams will be selected to compete. A pre-competition NTB design will be made available for selected teams to continue development of their systems leading up to the competition. A new NTB with modified assembly positions (very similar to the pre-competition task board), and new parts (identical to all parts used in practice), will be supplied prior to a team's scheduled competition run. All details can be found HERE. |
|
|
Chonnam National University (EST1, EST4) Giwan Lee, Jiyoung Choi, Jeongil Choi, Geon Kim, Phayuth Yonrith |
|
Defence Institute of Advanced Technology (EST3) Anamika B, Abir Paul, Abhilash Halder, Pradyum Aadith Sukumar, Nilesh Motwani |
|
Ewha Womans University (EST1) Hyojeong Yu, Minseo Kwon |
|
German Research Center for Artificial Intelligence - DFKI (EST1) Yuhan Jin, Dimitrios Rakovitis |
|
IIT (Italy) (EST4) Enrico Turco, Valerio Bo, Chiara Castellani, Maria Pozzi, Gionata Salvietti |
|
Kanazawa University (MT) Tokuo Tsuji, Ryunosuke Yamada, Kaihei Okada, Masanori Ueda, Takehiro Nishimura |
|
Kyushu Institute of Technology (EST1) Kakeru Yamasaki, Tomohiro Shibata, Krati Saxena, Takumi Kajiwara, Yuki Nakadera |
|
Samsung Research China – Beijing (SRC-B) (EST1) Yixiang Jin, Dingzhe Li, Yong A, Jun Shi, Yong Yang |
|
SCUT-ROBOT, South China University of Technology (EST1) Supeng Diao, Yang Cong, Yu Ren, Ronghan Chen, Jiawei Weng |
|
Shinshu University (EST1) Solvi Arnold, Kimitoshi Yamazaki, Daisuke Tanaka, Keisuke Onda, Akihisa Ishikawa Yusuke Kuribayashi Naoki Hiratsuka |
|
Smart Machines – TCS Research Noida (EST3) Chandan Kumar Singh, Devesh Kumar, Vipul Sanap, Mayank Khandelwal, Aman Srivastava |
|
Southern University of Science and Technology (EST1) Fang Wan, Linhan Yang, Haoran Sun, Ning Guo, Chaoyang Song |
|
Sungkyunkwan University (SKKU) (EST3) Yeong Gwang Son, Seunghwan Um, Bui Tat Hieu, Ho Sang Jung, Hyouk Ryeol Choi |
|
University of Ljubljana & Jožef Stefan Institute (EST1) Domen Tabernik, Andrej Gams, Peter Nimac, Matej Urbas, Jon Muhovič Danijel Skočaj |
|
University of Science and Technology of China (EST3) Zhen Kan, Zhangli Zhou, Shaochen Wang, Tangyu Qian, Yinxiao Tian |
|
Xi'an Jiaotong University (EST3) Chengzhong Ma, Haowen Sun, Houxue Yang, Shaolong Zhang, Xuguang Lan |
|
Xi'an Jiaotong University (EST4) Wan Lipeng, Xu Jie, Zhao Chao, Wang Han, Luo Jiayuan |
|
University College Dublin (EST1) Yixin Deng, Keru Wang, Qiang Wang |
|
University College Dublin (EST2) Yixin Deng, Keru Wang, Olivia Leslie , David Cordova Bulens, Qiang Wang |
|
ETH Zurich (EST1) Hehui Zheng, Barnabas Gavin Cangan |
|
ETH (EST4) Alexander M. Kübler, Barnabas Gavin Cangan, Amirhossein Kazemipour, Hehui Zheng, Davide Liconti |
|
MIT (EST1) Neha Sunil, Megha Tippur |
|
Tsinghua University (EST2) Yongpeng Jiang, Mingrui Yu, Yongyi Jia, Chen Chen and Rui Huang |
|
Tsinghua University (EST3) Shihefeng Wang, Xiang Li, Weiduo Gong, Yingyue Li, Junqi Ge |
|
Tsinghua University (MT) Guyue Zhou, Beiwen Tian, Kairui Ding, Lu Shi, Liyi Luo |
|
Tsinghua University & Sun Yat-sen University (EST3) Xueqian Wang, Shoujie Li, Xiankun Zhu, Yucheng Xin, Xianru Tian |
|
Tsinghua University (EST2) Xueqian Wang, Houde Liu, Junbo Tan, Chongkun Xia, |
|
Tsinghua SIGS (EST1) Chongkun Xia, Kai Mo, Yanzhao Yu, Keith Lin, Binqiang Ma |
|
Tsinghua Shenzhen International Graduate School (MT) Junbo Tan, Yichen Huang, Haotian Yang, Hong Luo, Kevin Fan |
|
JAKS (MT) Tokuo Tsuji, Ryunosuke Yamada, Kaihei Okada, Masanori Ueda, Takehiro Nishimura |
|
Tsinghua 3C United Team (MT) Fuchun Sun, Huaidong Zhou, Wentao Liu, Jiahui Guo, Jiaxing Hou |
| Registration deadline: | January |
| Acceptance Announcement: | |
| Travel Support Application: | April 1, 2024 |
| Travel Support Announcement: | September 30, 2024 |
| Competition Days: | May 14-16, 2024 (tentative) |
Jose AvendañoSenior Robotics Engineer for Student Programs at The MathWorks |
Berk Calli (primary contact person for EST)Assistant Professor at WPI |
Podshara ChanrungmaneekulPh.D. Student at Rice University |
Andrea Cavallaro (primary contact person for EST Sub-Track 4)Professor at EPFL |
Joseph FalcoProject Manager of National Institute of Standards and Technology (NIST) |
Salvatore D'Avella (primary contact person for EST Sub-Track 3)Assistant Professor at Scuola Superiore Sant’Anna |
Victor-Louis De Gusseme (primary contact person for EST Sub-Track 1)Researcher at the Universiteit Gent |
Kaiyu Hang (primary contact person for EST Sub-Track 2)Assistant Professor at Rice University |
Kenny Kimble (primary contact person for MT)Research Engineer at the National Institute of Standards and Technology (NIST) |
Ziyuan LiuChief scientist on AI robotics and simulation technologies at Huawei Cloud computing |
Anastasia MavrommatiSenior Robotics Research Scientist at the MathWorks Advanced Research \& Technology Office |
Maximo A. RoaSenior scientific Researcher and Group Leader at the Institute of Robotics and Mechatronics in the German Aerospace Center – DLR |
Yu Sun (primary contact)Professor at the University of South Florida |
Ping TanProfessor at the Hong Kong University of Science and Technology |
Francis wyffelsProfessor at the Universiteit Gent |
Alessio XomperoPost-doc at Queen Mary University of London |